首先是飞行器在飞行过程中的飞行姿态
欧拉角:(先了解是什么再记他的概念)
pitch(俯仰角):俯仰:将物体绕Y轴旋转(个人感觉动态图好理解所以加图)
yaw(航向角) ,将无人机绕Z轴旋转
roll(横滚轴),绕X轴旋转
四旋翼无人机飞行器根据机头朝向分为“+”型和“x”,好理解,我现在用的是x型的,所以按x型的来
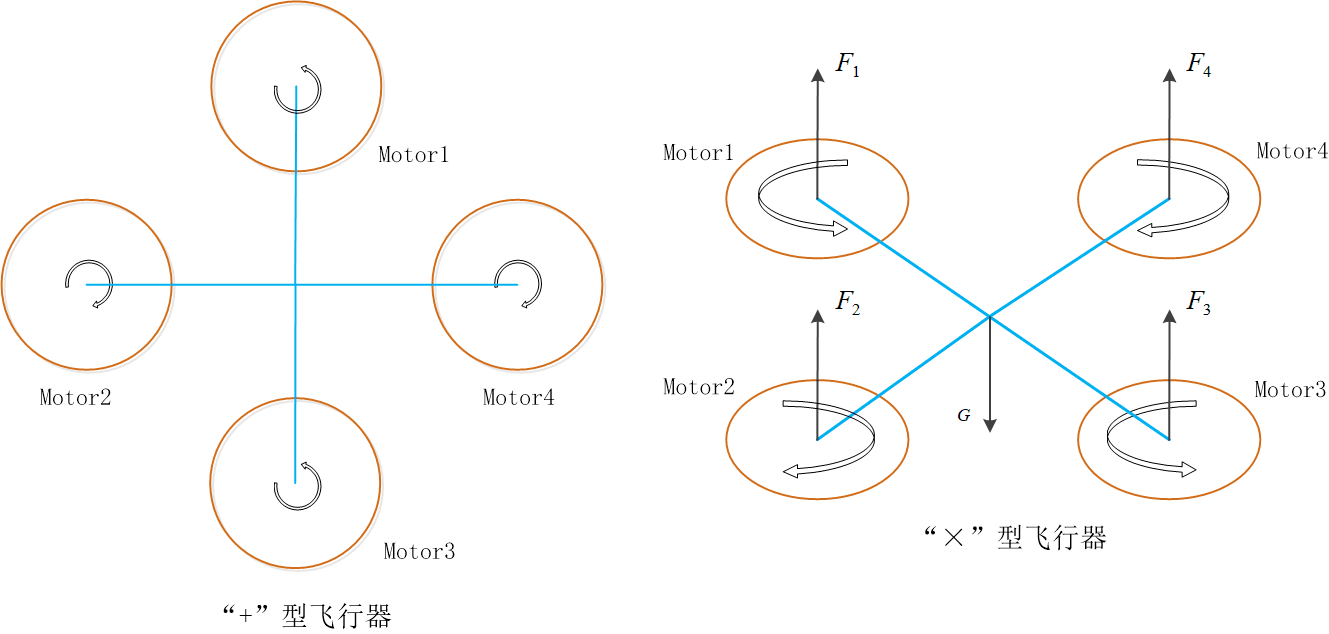
1和3号电机逆时针旋转,产生逆时针扭矩,24电机顺时针旋转产生顺时针扭矩,当顺时针和逆时针的电机转速相同是,上升合力等于自身重力<-------悬停就是怎样做到的(简单点理解就是顺逆时针的力抵消了,也不能讲是抵消应该比作两块同级的磁铁,维持住了一种静止状态)
俯仰运动:回去看俯仰角是什么状态的:
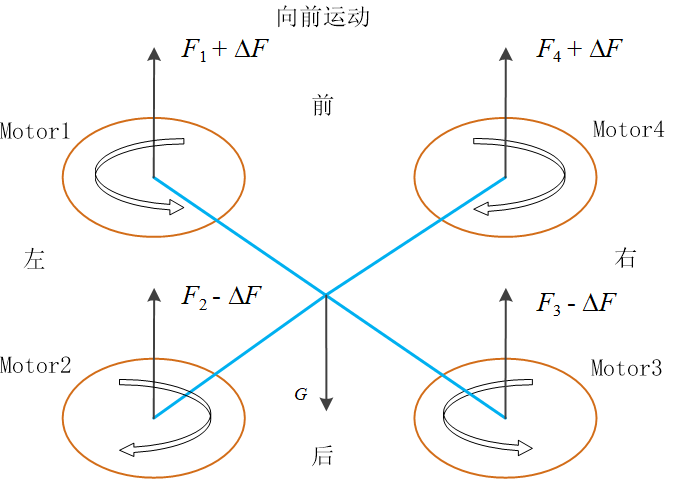
将电机1和4的转速减小或者你将电机2和3的转速增加的时候用你个人理解的方式就是它就会前倾或者后倾,14增加向后飞,23增加向前飞,就是哪边给电机转速就往那边朝。
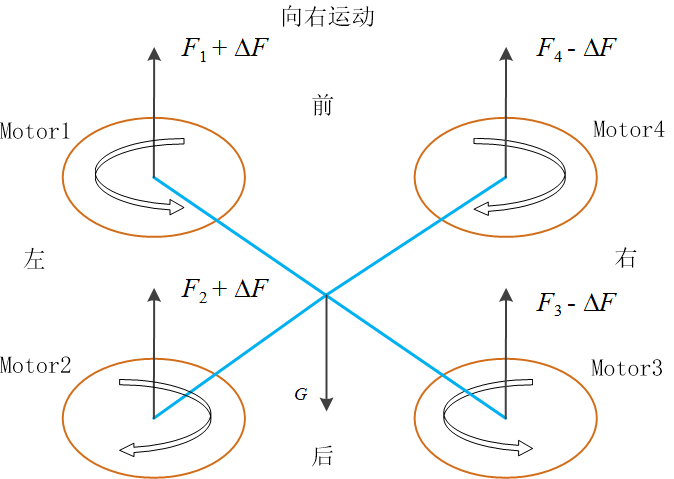
滚动运动:就是roll,x轴旋转,理解了上一个这个就更好理解了,在我来看就是换个系的事,它要是安机头正方向算它都是俯仰运动了,12电机加转速就往12这飞,哪加转速往哪飞
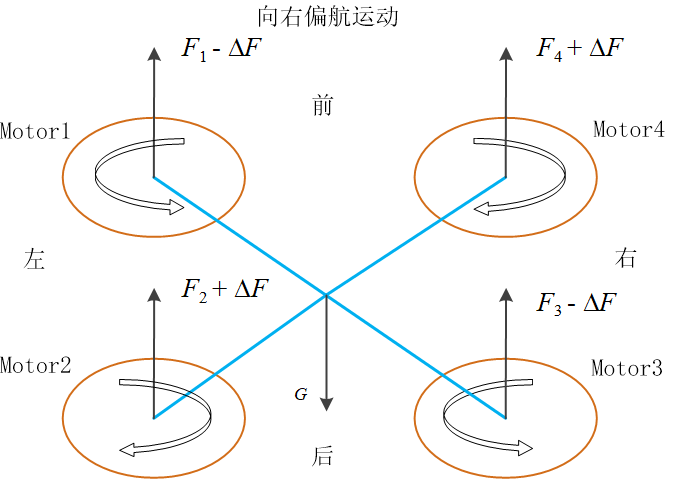
偏航运动:斜对角增加,这个记住就行了。24加转速往2这飞,你这样记,按照机头朝向这两边前边的电机记,谁前边加速就哪加往哪飞
下面到正题了,开始飞控部分
先提下飞控组成(以凌霄举例)
飞控主要有两大部分组成:IMU和MCU 通过串口进行部分数据通信
所以你的疑问应该有挺多的(这些都是概念怎么理解)
分开来讲:
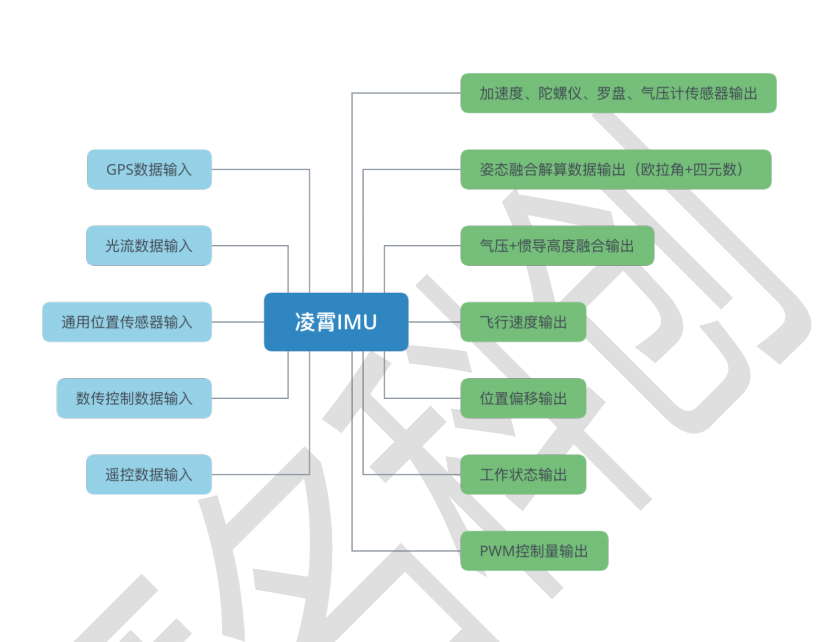
IMU是什么?
IMU是一种可以叫他惯性测量单元,无人机上必要的,你想一下上边介绍了一堆,我该用什么去了解它们的数据,所以IMU包含了一堆传感器:
惯性传感器:BMI088(加速度,陀螺仪)
磁场传感器:IST8310/QMC6310(罗盘)
气压传感器:SPL06(气压高度)
这里提一点:一共有两种飞控
一种是自己搓的,这种好处就是你自己diy,问题在安全性不保证,危险
一种是买的,但是它会怕你做些更改或者拿来抄,所以它会封装好
所以IMU是一个多传感器共同作用下的一种集成
然后就是MCU,这是写具体控制和实现的地方,就是看你用什么型号的板子来做
IMU测来的数据会通过串口将数据反馈给MCU,MCU因为连接了电调:(在之前我讲过电调是用来控制电机转速的)IMU发过来的PWM数据转换成PWM波输出给电调,然后去控制电机的转速
并根据IMU发来的数据控制或判断无人机的飞行
这里大概简单点就是
i
大概这部分就是这些,都是最基础的部分,有这部分知识上手的时候就基本上能看懂大部分东西了
