树莓派安装系统时选择ubuntu22.04或20.04版本
像下图直接使用官方给的树莓派镜像烧录器选择other general-purpose OS
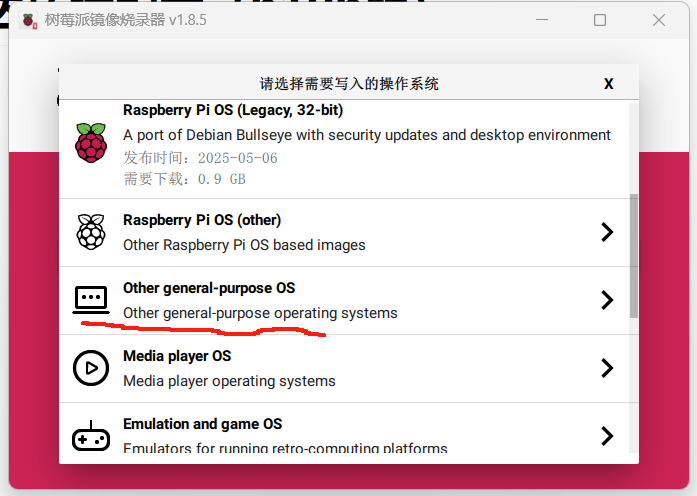
进入后选择Ubuntu的系统
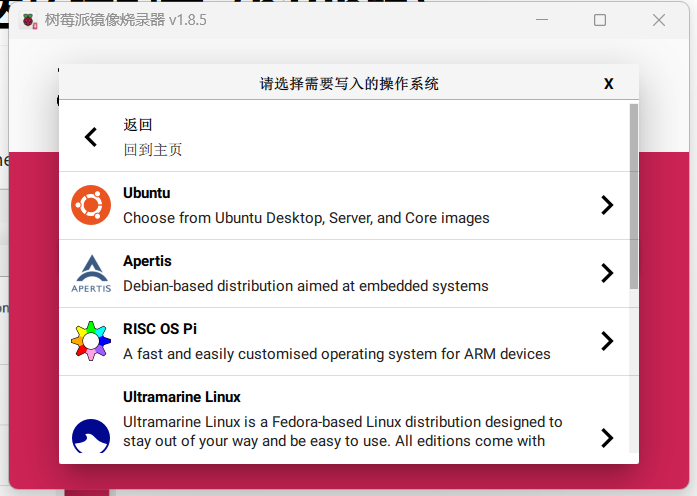
然后在Ubuntu系统中选择22.04或20.04的destop桌面版(20.04的好像现在没有destop的了)进行烧录安装。
然后将SD卡插入树莓派进行开机
进入界面后首先Ctrl Alt T进入终端,我们首先要部署Ros2环境,这里我用的是小鱼的一键部署
wget http://fishros.com/install -O fishros && . fishros将这串命令复制到终端回车进行一键安装
根据数字选择自己要安装的版本和要求
我建议选择ROS2 humble版本的并且在安装时在选择是否更换清除更新源的时候小白一定要选是,选择桌面版
出现这串命令就说明安装好了,然后我们进行下一步操作
因为镭神官方给的资料有一点乱,如果自己搞不定就要去折腾很久,费时间,所以我会在这里捋一下。
首先我们要把官方资料给的所需文件放在树莓派中,这里你用什么传输形式都随便,只要能传都是可以的,我用的filezilla(好用)
输入命令查看树莓派ip地址。
hostname -I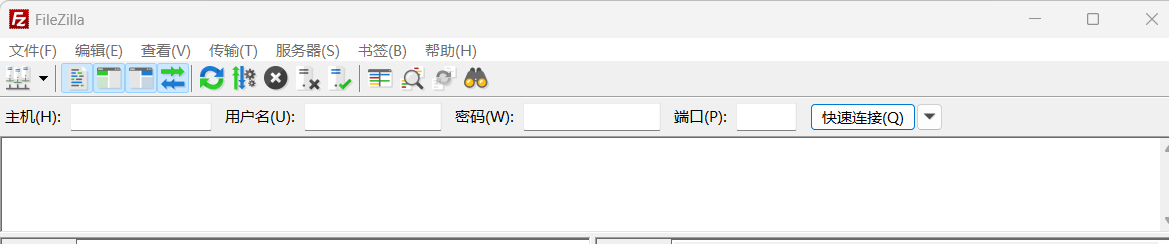
然后根据输入用户名和密码进行快速连接就可以了将需要的文件传输到树莓派中(注意主机要和树莓派在同一区域网下)
并且要给传文件的文件夹下永久给予权限
sudo chmod -R 777 文件夹名然后我们将这个文件夹传输到我们给了权限的文件夹下

然后在在树莓派中创建一个文件夹leishen_ws(什么都可以但是不能出现中文)在leishen_ws中创建一个子文件夹src,将上面文件夹放在src中
然后别忘记将这个规则文件移到这里,没有这个规则文件后边玩不转

我发的里边有路径,根据路径复制到所对应的文件夹
然后下一步就是要找到你的串口在哪个
ls /dev
然后应该是这样,你去找ttyACM0或者ttyUSB0,应该就这两个都会有。
或者可以这样
find /dev -name "*ACM*" 这是直接通配就行了ls /dev/ | grep ttyACM0 查看是不是有这个sudo chmod 777 /dev/ttyACM0 给它设备读写权限这时候最大的问题在这里,就是你每一次启动树莓派其实都要给它一个设备读写权限,很麻烦,我直接把怎么弄给你
ls -l /dev/ttyACM0
会看到它属于哪个用户组
我们只需要将自己所在的用户加入该组,就可以永久拥有该串口的读写权限了
whoami 查看当前用户sudo usermod -a -G dialout $USER 不要忘记-a标志(用于添加组而不是替换组,不然会出现别的问题)sudo reboot 重启系统然后按这样操作
sudo apt install python3-colcon-common-extensionsHumble:sudo apt-get install ros-humble-diagnostic-updatersudo apt-get install libpcap-devcolcon build
编译成功是这样的,有警告不要管,不影响。
你要去运行一下规则文件
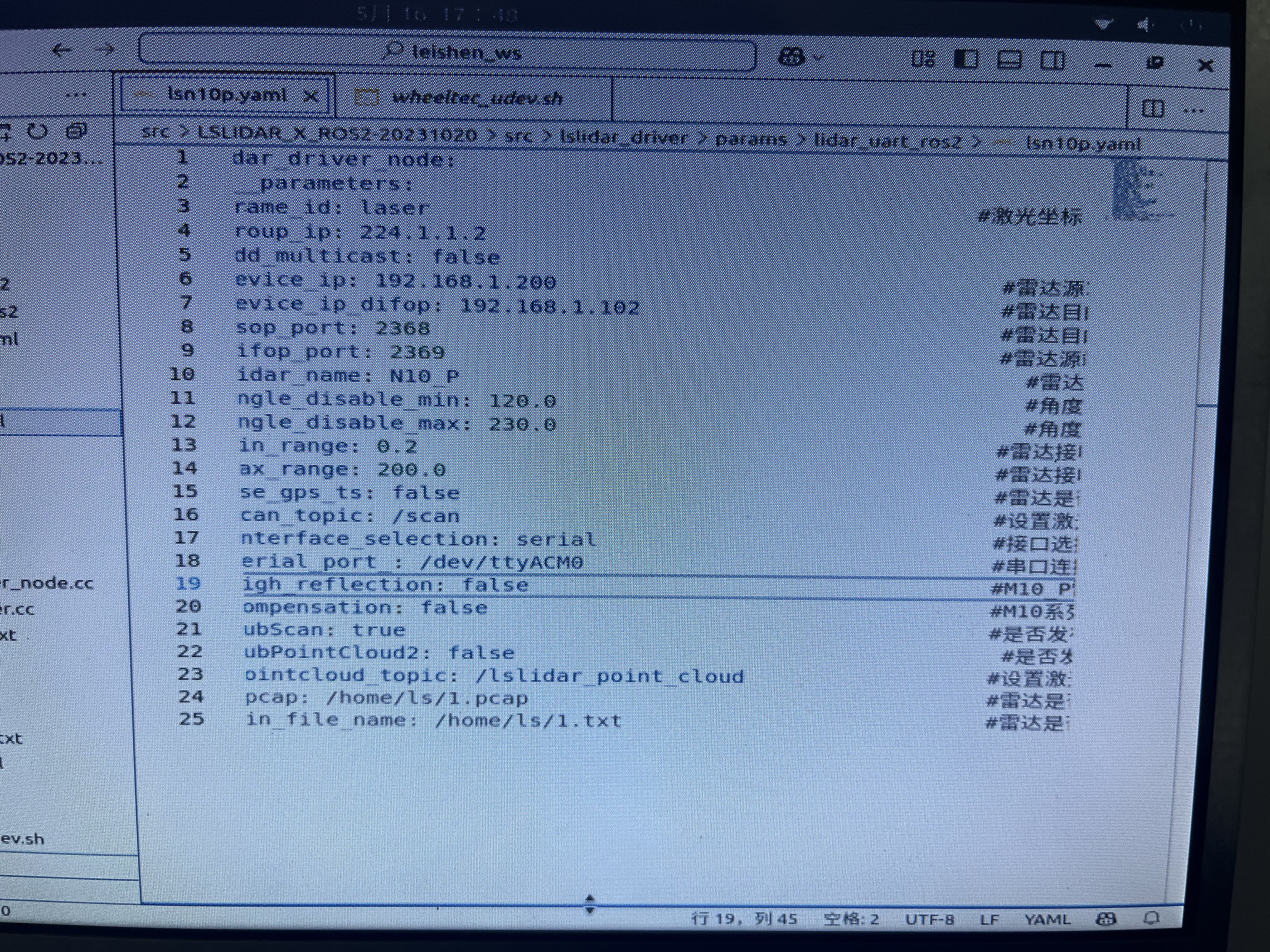
sudo sh wheeltec_udev.sh编译好了以后你需要做一件事,就是到这里把你的串口改一下,改成你之前给了权限的串口
然后这时候按指令就可以运行了,但是你每一次开机都要重新编译执行一次,所以你要在这里添加一个路径让在运行的时候自动找到这串路径
Ctrl H打开隐藏文件,找到.bashrc的文件点进去编辑
把这串路径按这样格式写进去
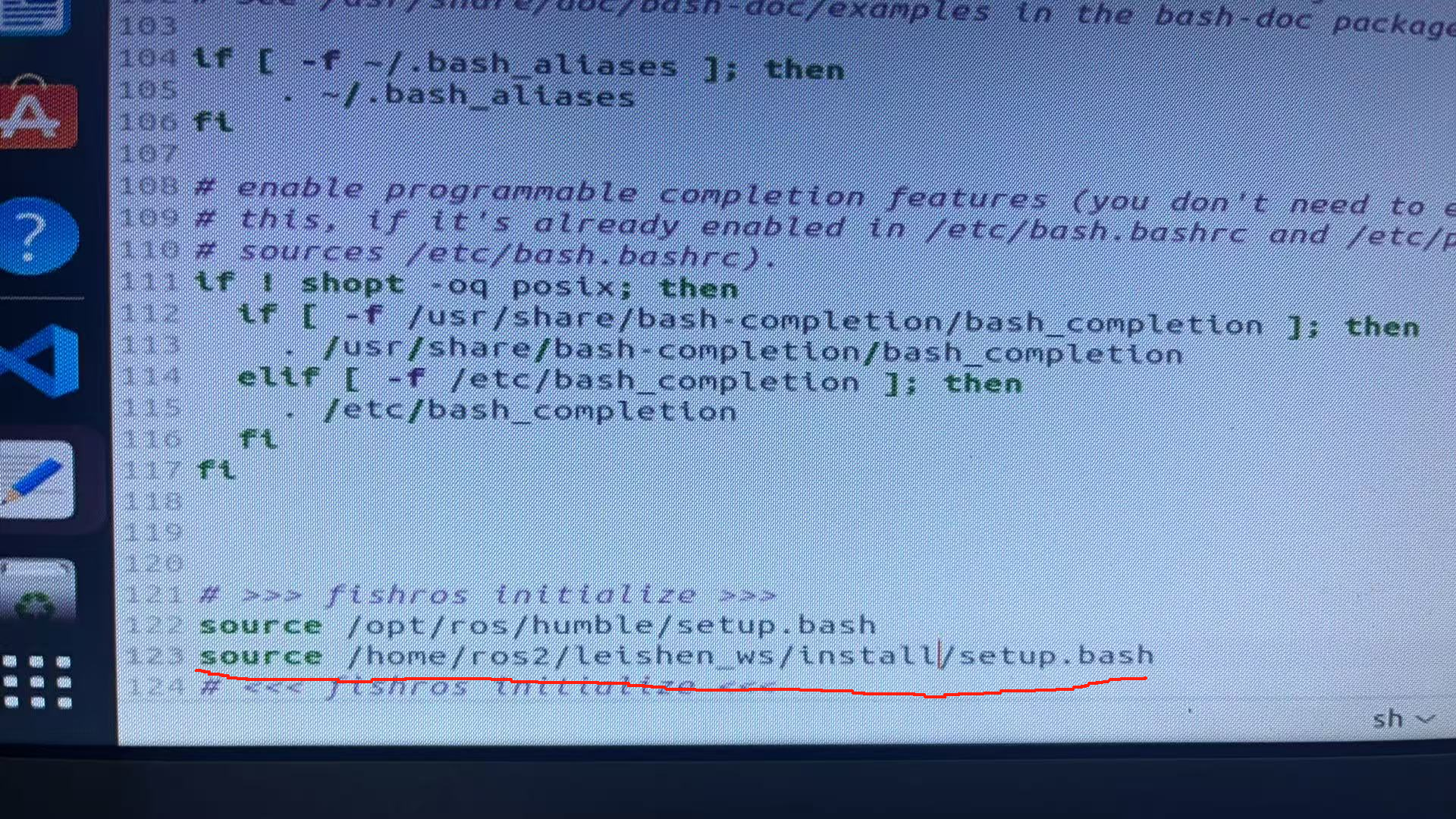
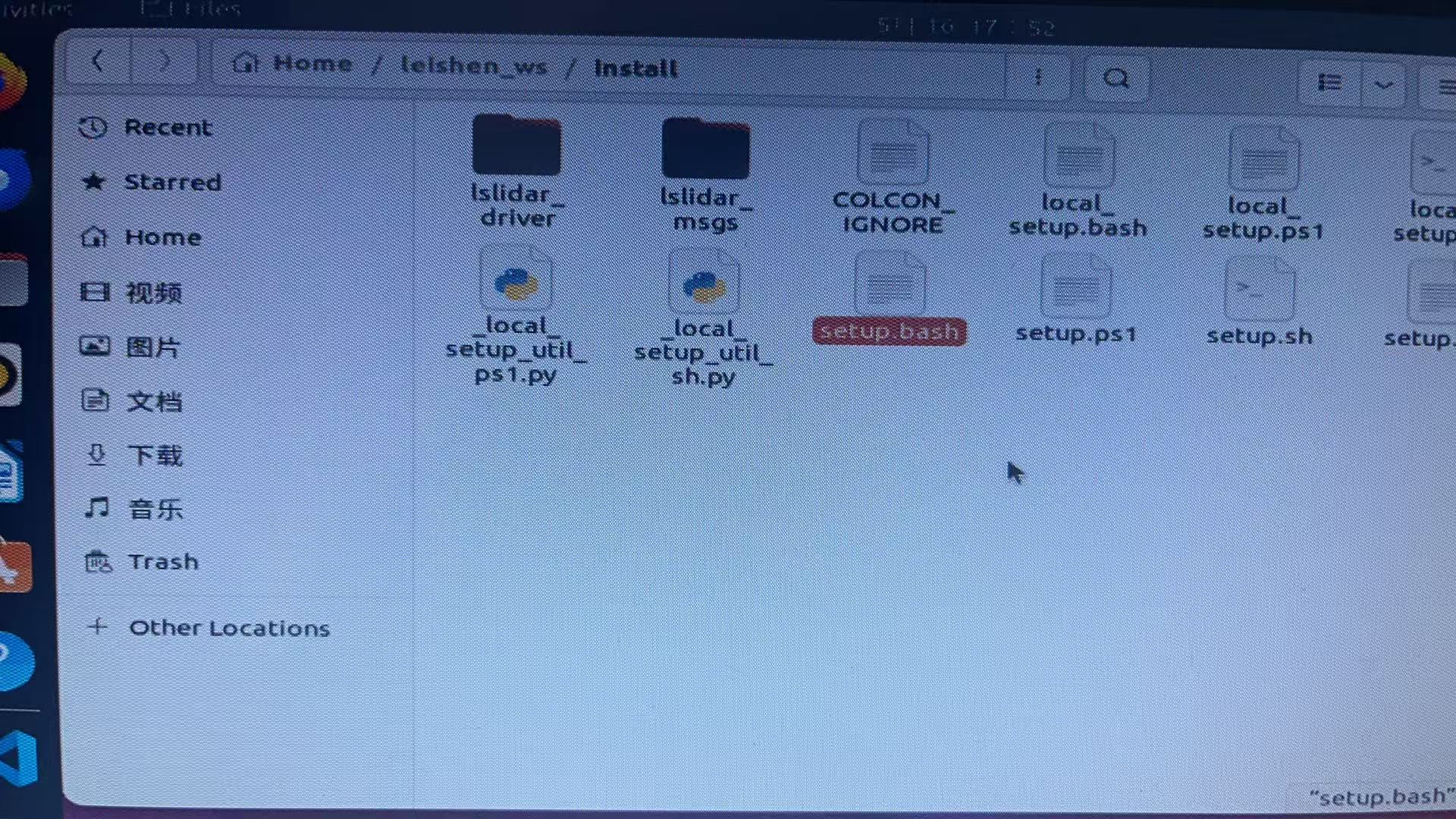
去找setup.bash文件的路径
写好以后保存,然后需要去重新编译一下
colcon build --packages-select lslidar_driversource install/setup.bash然后就可以去运行了
ros2 launch lslidar_driver lsn10p_launch.py 运行激光雷达ros2 launch lslidar_driver viewer_scan_launch.py 雷达启动后另起一个终端去看点云
successfully!
